Tên của robot là từ viết tắt của "Côn trùng robot có khớp nối có chân",áttriểnloạirobotlấycảmhứngtừcôntrùngcóthểbiếnđổikíchthướckhiđiquakhônggianhẹbxh hang 2 phap CLARI được tạo ra tại Đại học Colorado-Boulder bởi một nhóm do tiến sĩ kỹ thuật Heiko Kabutz dẫn đầu. Ông đã cộng tác với Giáo sư Kaushik Jayaram, người trước đây đã tạo ra robot lấy cảm hứng từ loài gián có khả năng tự làm phẳng để chui qua các khoảng trống thẳng đứng.
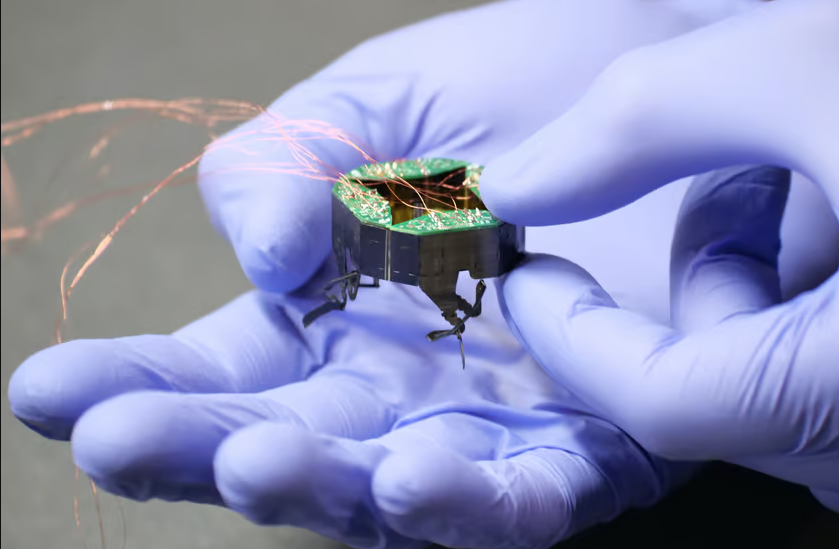
Robot có kích thước bằng một miếng sushi cuộn, cơ thể bốn chân của CLARI gần như vuông khi nhìn từ trên xuống và được tạo thành từ bốn phần nối với nhau bằng lớp da bên ngoài linh hoạt của robot. Mỗi phần bao gồm một chân cùng với bảng mạch riêng và bộ truyền động kép giúp di chuyển chân về phía trước và phía sau cũng như từ bên này sang bên kia. Điều này có nghĩa là mỗi chân có thể hoạt động độc lập với các chân khác.

 相关文章
相关文章




 精彩导读
精彩导读




 热门资讯
热门资讯 关注我们
关注我们
